|
coreboot
coreboot is an Open Source project aimed at replacing the proprietary BIOS found in most computers.
|
|
coreboot
coreboot is an Open Source project aimed at replacing the proprietary BIOS found in most computers.
|
#include <ec_commands.h>
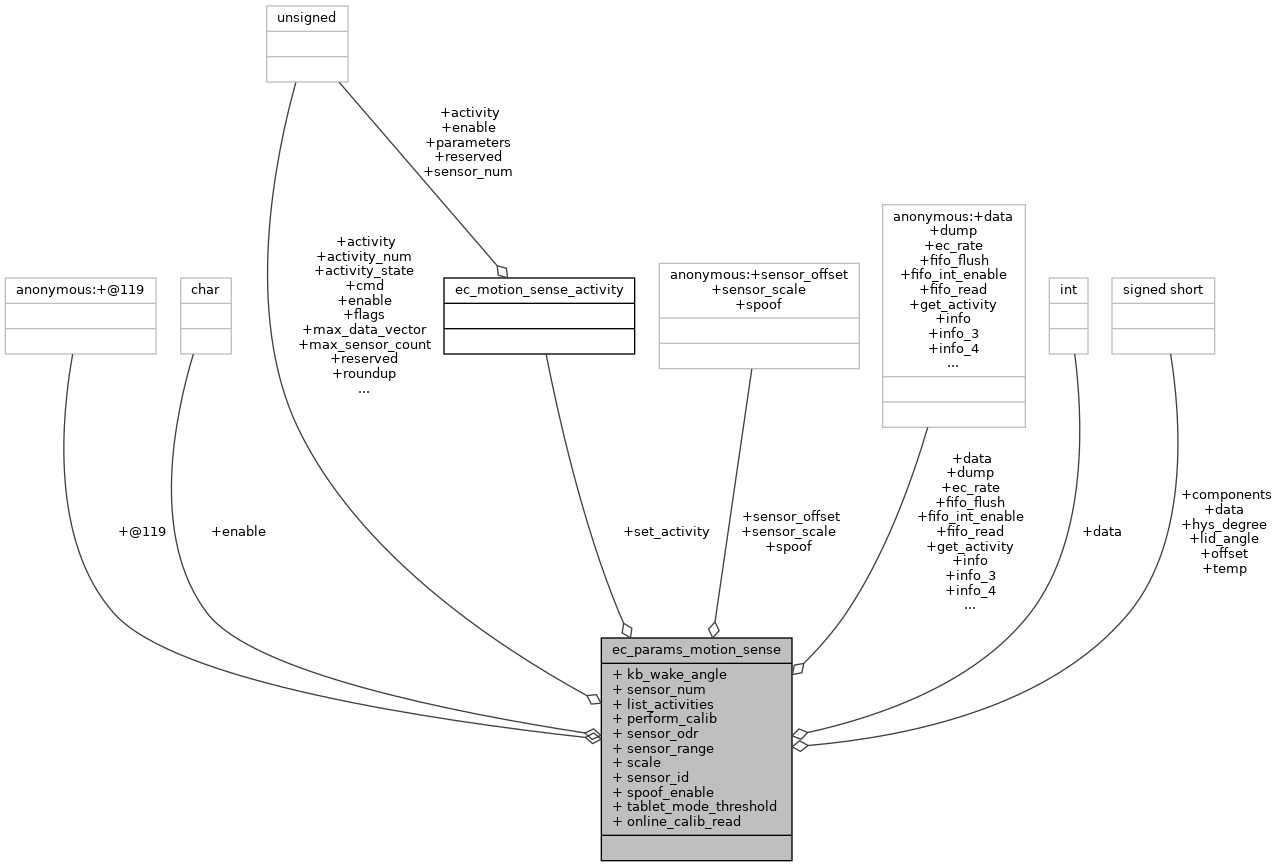
Definition at line 2851 of file ec_commands.h.
| union { ... } |
| uint8_t ec_params_motion_sense::activity |
Definition at line 3048 of file ec_commands.h.
| uint8_t ec_params_motion_sense::activity_num |
Definition at line 3009 of file ec_commands.h.
| uint8_t ec_params_motion_sense::activity_state |
Definition at line 3012 of file ec_commands.h.
| uint8_t ec_params_motion_sense::cmd |
Definition at line 2852 of file ec_commands.h.
| int16_t ec_params_motion_sense::components[3] |
Definition at line 3004 of file ec_commands.h.
| int16_t ec_params_motion_sense::data |
Definition at line 2871 of file ec_commands.h.
| struct { ... } ::__ec_todo_unpacked ec_params_motion_sense::data |
| int32_t ec_params_motion_sense::data |
Definition at line 2903 of file ec_commands.h.
| struct { ... } ::__ec_todo_unpacked ec_params_motion_sense::dump |
| struct { ... } ::__ec_todo_unpacked ec_params_motion_sense::ec_rate |
| uint8_t ec_params_motion_sense::enable |
Definition at line 2887 of file ec_commands.h.
| int8_t ec_params_motion_sense::enable |
Definition at line 2989 of file ec_commands.h.
| struct { ... } ::__ec_todo_unpacked ec_params_motion_sense::fifo_flush |
| struct { ... } ::__ec_todo_unpacked ec_params_motion_sense::fifo_int_enable |
| struct { ... } ::__ec_todo_unpacked ec_params_motion_sense::fifo_read |
| uint16_t ec_params_motion_sense::flags |
Definition at line 2915 of file ec_commands.h.
| struct { ... } ::__ec_todo_unpacked ec_params_motion_sense::get_activity |
| int16_t ec_params_motion_sense::hys_degree |
Definition at line 3032 of file ec_commands.h.
| struct { ... } ::__ec_todo_unpacked ec_params_motion_sense::info |
| struct { ... } ::__ec_todo_unpacked ec_params_motion_sense::info_3 |
| struct { ... } ::__ec_todo_unpacked ec_params_motion_sense::info_4 |
| struct { ... } ::__ec_todo_unpacked ec_params_motion_sense::kb_wake_angle |
| int16_t ec_params_motion_sense::lid_angle |
Definition at line 3023 of file ec_commands.h.
| struct { ... } ::__ec_todo_unpacked ec_params_motion_sense::list_activities |
| uint32_t ec_params_motion_sense::max_data_vector |
Definition at line 2974 of file ec_commands.h.
| uint8_t ec_params_motion_sense::max_sensor_count |
Definition at line 2861 of file ec_commands.h.
| int16_t ec_params_motion_sense::offset[3] |
Definition at line 2932 of file ec_commands.h.
| struct { ... } ::__ec_todo_unpacked ec_params_motion_sense::online_calib_read |
| struct { ... } ::__ec_todo_unpacked ec_params_motion_sense::perform_calib |
| uint16_t ec_params_motion_sense::reserved |
Definition at line 2900 of file ec_commands.h.
| uint8_t ec_params_motion_sense::reserved |
Definition at line 3000 of file ec_commands.h.
| uint8_t ec_params_motion_sense::roundup |
Definition at line 2898 of file ec_commands.h.
| uint16_t ec_params_motion_sense::scale[3] |
Definition at line 2961 of file ec_commands.h.
| uint8_t ec_params_motion_sense::sensor_id |
Definition at line 2994 of file ec_commands.h.
| uint8_t ec_params_motion_sense::sensor_num |
Definition at line 2878 of file ec_commands.h.
| struct { ... } ::__ec_todo_unpacked ec_params_motion_sense::sensor_odr |
| struct { ... } ::__ec_todo_packed ec_params_motion_sense::sensor_offset |
| struct { ... } ::__ec_todo_unpacked ec_params_motion_sense::sensor_range |
| struct { ... } ::__ec_todo_packed ec_params_motion_sense::sensor_scale |
| struct ec_motion_sense_activity ec_params_motion_sense::set_activity |
Definition at line 2852 of file ec_commands.h.
| struct { ... } ::__ec_todo_packed ec_params_motion_sense::spoof |
| uint8_t ec_params_motion_sense::spoof_enable |
Definition at line 2997 of file ec_commands.h.
| struct { ... } ::__ec_todo_unpacked ec_params_motion_sense::tablet_mode_threshold |
| int16_t ec_params_motion_sense::temp |
Definition at line 2923 of file ec_commands.h.